注意
转到末尾下载完整的示例代码。或通过 Binder 在浏览器中运行此示例
圆形和椭圆形霍夫变换#
霍夫变换最简单的形式是检测直线的方法,但它也可以用于检测圆形或椭圆形。该算法假设已检测到边缘,并且它对噪声或缺失点具有鲁棒性。
圆形检测#
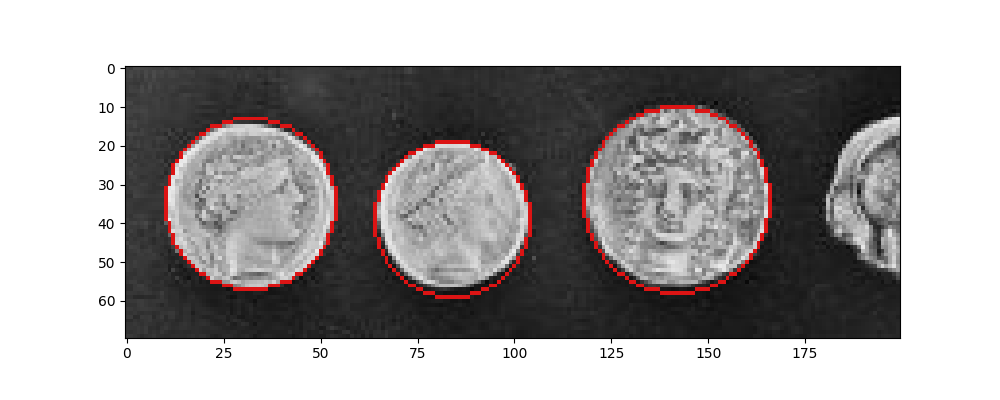
在以下示例中,霍夫变换用于检测硬币的位置并匹配其边缘。我们提供了一系列合理的半径。对于每个半径,提取两个圆,最后保留五个最突出的候选对象。结果表明,硬币位置已很好地检测到。
算法概述#
给定白色背景上的黑色圆圈,我们首先猜测其半径(或一系列半径)以构造一个新圆。此圆应用于原始图片的每个黑色像素,并且此圆的坐标在累加器中投票。从这种几何结构来看,原始圆心位置获得最高分。
请注意,累加器的大小构建为大于原始图片,以便检测帧外的中心。其大小扩展为最大半径的两倍。
import numpy as np
import matplotlib.pyplot as plt
from skimage import data, color
from skimage.transform import hough_circle, hough_circle_peaks
from skimage.feature import canny
from skimage.draw import circle_perimeter
from skimage.util import img_as_ubyte
# Load picture and detect edges
image = img_as_ubyte(data.coins()[160:230, 70:270])
edges = canny(image, sigma=3, low_threshold=10, high_threshold=50)
# Detect two radii
hough_radii = np.arange(20, 35, 2)
hough_res = hough_circle(edges, hough_radii)
# Select the most prominent 3 circles
accums, cx, cy, radii = hough_circle_peaks(hough_res, hough_radii, total_num_peaks=3)
# Draw them
fig, ax = plt.subplots(ncols=1, nrows=1, figsize=(10, 4))
image = color.gray2rgb(image)
for center_y, center_x, radius in zip(cy, cx, radii):
circy, circx = circle_perimeter(center_y, center_x, radius, shape=image.shape)
image[circy, circx] = (220, 20, 20)
ax.imshow(image, cmap=plt.cm.gray)
plt.show()
椭圆形检测#
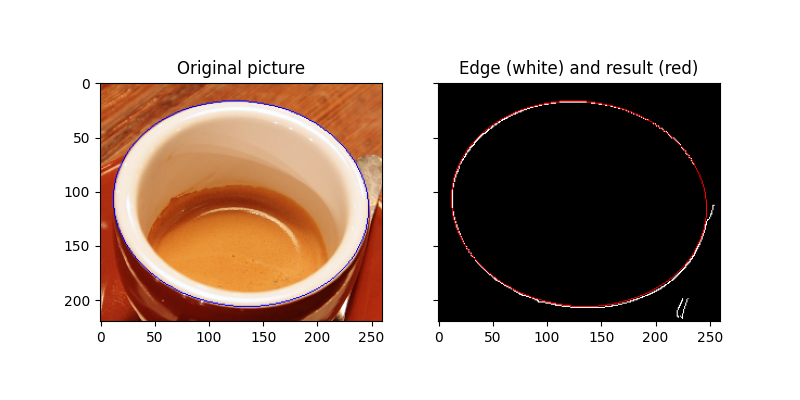
在第二个示例中,目的是检测咖啡杯的边缘。基本上,这是圆的投影,即椭圆。要解决的问题更加困难,因为必须确定五个参数,而不是圆的三个参数。
算法概述#
该算法取属于椭圆的两个不同的点。它假设这两个点构成主轴。对所有其他点的循环确定候选椭圆的短轴长度。如果足够多的“有效”候选对象具有相似的短轴长度,则将后者包括在结果中。所谓有效,是指短轴和长轴的长度都在规定的范围内。算法的完整描述可以在参考资料 [1]中找到。
参考文献#
import matplotlib.pyplot as plt
from skimage import data, color, img_as_ubyte
from skimage.feature import canny
from skimage.transform import hough_ellipse
from skimage.draw import ellipse_perimeter
# Load picture, convert to grayscale and detect edges
image_rgb = data.coffee()[0:220, 160:420]
image_gray = color.rgb2gray(image_rgb)
edges = canny(image_gray, sigma=2.0, low_threshold=0.55, high_threshold=0.8)
# Perform a Hough Transform
# The accuracy corresponds to the bin size of the histogram for minor axis lengths.
# A higher `accuracy` value will lead to more ellipses being found, at the
# cost of a lower precision on the minor axis length estimation.
# A higher `threshold` will lead to less ellipses being found, filtering out those
# with fewer edge points (as found above by the Canny detector) on their perimeter.
result = hough_ellipse(edges, accuracy=20, threshold=250, min_size=100, max_size=120)
result.sort(order='accumulator')
# Estimated parameters for the ellipse
best = list(result[-1])
yc, xc, a, b = (int(round(x)) for x in best[1:5])
orientation = best[5]
# Draw the ellipse on the original image
cy, cx = ellipse_perimeter(yc, xc, a, b, orientation)
image_rgb[cy, cx] = (0, 0, 255)
# Draw the edge (white) and the resulting ellipse (red)
edges = color.gray2rgb(img_as_ubyte(edges))
edges[cy, cx] = (250, 0, 0)
fig2, (ax1, ax2) = plt.subplots(
ncols=2, nrows=1, figsize=(8, 4), sharex=True, sharey=True
)
ax1.set_title('Original picture')
ax1.imshow(image_rgb)
ax2.set_title('Edge (white) and result (red)')
ax2.imshow(edges)
plt.show()
脚本的总运行时间: (0 分钟 7.105 秒)