注意
转到末尾下载完整的示例代码。或者通过 Binder 在浏览器中运行此示例
基础矩阵估计#
此示例演示了如何使用稀疏 ORB 特征对应关系来稳健地估计两个视图之间的极线 几何(立体视觉的几何)。
基础矩阵关联一对未校准图像之间的对应点。该矩阵将一个图像中的齐次图像点转换为另一个图像中的极线。
未校准意味着两个相机的内在校准(焦距、像素倾斜、主点)是未知的。因此,基础矩阵可以对捕获的场景进行投影 3D 重建。如果校准已知,则估计基本矩阵可以对捕获的场景进行度量 3D 重建。
Number of matches: 223
Number of inliers: 162
import numpy as np
from skimage import data
from skimage.color import rgb2gray
from skimage.feature import match_descriptors, ORB, plot_matched_features
from skimage.measure import ransac
from skimage.transform import FundamentalMatrixTransform
import matplotlib.pyplot as plt
img_left, img_right, groundtruth_disp = data.stereo_motorcycle()
img_left, img_right = map(rgb2gray, (img_left, img_right))
# Find sparse feature correspondences between left and right image.
descriptor_extractor = ORB()
descriptor_extractor.detect_and_extract(img_left)
keypoints_left = descriptor_extractor.keypoints
descriptors_left = descriptor_extractor.descriptors
descriptor_extractor.detect_and_extract(img_right)
keypoints_right = descriptor_extractor.keypoints
descriptors_right = descriptor_extractor.descriptors
matches = match_descriptors(descriptors_left, descriptors_right, cross_check=True)
print(f'Number of matches: {matches.shape[0]}')
# Estimate the epipolar geometry between the left and right image.
random_seed = 9
rng = np.random.default_rng(random_seed)
model, inliers = ransac(
(keypoints_left[matches[:, 0]], keypoints_right[matches[:, 1]]),
FundamentalMatrixTransform,
min_samples=8,
residual_threshold=1,
max_trials=5000,
rng=rng,
)
inlier_keypoints_left = keypoints_left[matches[inliers, 0]]
inlier_keypoints_right = keypoints_right[matches[inliers, 1]]
print(f'Number of inliers: {inliers.sum()}')
# Compare estimated sparse disparities to the dense ground-truth disparities.
disp = inlier_keypoints_left[:, 1] - inlier_keypoints_right[:, 1]
disp_coords = np.round(inlier_keypoints_left).astype(np.int64)
disp_idxs = np.ravel_multi_index(disp_coords.T, groundtruth_disp.shape)
disp_error = np.abs(groundtruth_disp.ravel()[disp_idxs] - disp)
disp_error = disp_error[np.isfinite(disp_error)]
# Visualize the results.
fig, ax = plt.subplots(nrows=2, ncols=1)
plt.gray()
plot_matched_features(
img_left,
img_right,
keypoints0=keypoints_left,
keypoints1=keypoints_right,
matches=matches[inliers],
ax=ax[0],
only_matches=True,
)
ax[0].axis("off")
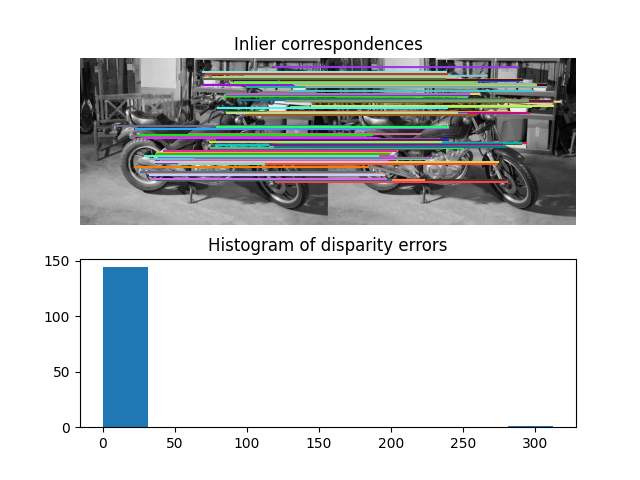
ax[0].set_title("Inlier correspondences")
ax[1].hist(disp_error)
ax[1].set_title("Histogram of disparity errors")
plt.show()
脚本的总运行时间: (0 分钟 1.894 秒)