注意
转到末尾以下载完整的示例代码。或通过 Binder 在浏览器中运行此示例
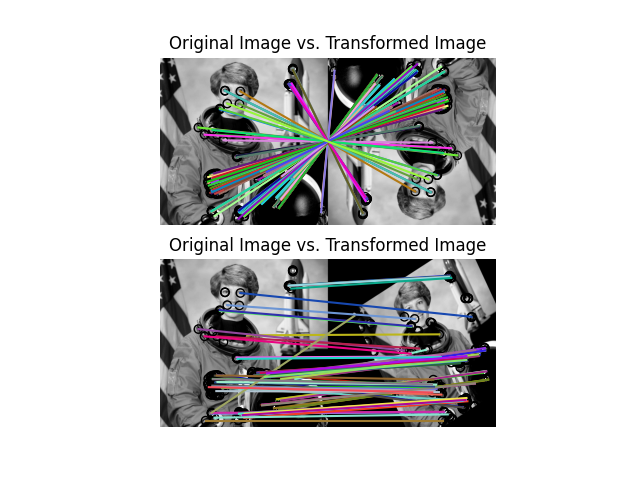
ORB 特征检测器和二进制描述符#
此示例演示了 ORB 特征检测和二进制描述算法。它使用定向 FAST 检测方法和旋转的 BRIEF 描述符。
与 BRIEF 不同,ORB 具有相对的尺度和旋转不变性,同时仍然采用非常高效的汉明距离度量进行匹配。因此,它更适合实时应用程序。
from skimage import data
from skimage import transform
from skimage.feature import match_descriptors, ORB, plot_matched_features
from skimage.color import rgb2gray
import matplotlib.pyplot as plt
img1 = rgb2gray(data.astronaut())
img2 = transform.rotate(img1, 180)
tform = transform.AffineTransform(scale=(1.3, 1.1), rotation=0.5, translation=(0, -200))
img3 = transform.warp(img1, tform)
descriptor_extractor = ORB(n_keypoints=200)
descriptor_extractor.detect_and_extract(img1)
keypoints1 = descriptor_extractor.keypoints
descriptors1 = descriptor_extractor.descriptors
descriptor_extractor.detect_and_extract(img2)
keypoints2 = descriptor_extractor.keypoints
descriptors2 = descriptor_extractor.descriptors
descriptor_extractor.detect_and_extract(img3)
keypoints3 = descriptor_extractor.keypoints
descriptors3 = descriptor_extractor.descriptors
matches12 = match_descriptors(descriptors1, descriptors2, cross_check=True)
matches13 = match_descriptors(descriptors1, descriptors3, cross_check=True)
fig, ax = plt.subplots(nrows=2, ncols=1)
plt.gray()
plot_matched_features(
img1,
img2,
keypoints0=keypoints1,
keypoints1=keypoints2,
matches=matches12,
ax=ax[0],
)
ax[0].axis('off')
ax[0].set_title("Original Image vs. Transformed Image")
plot_matched_features(
img1,
img3,
keypoints0=keypoints1,
keypoints1=keypoints3,
matches=matches13,
ax=ax[1],
)
ax[1].axis('off')
ax[1].set_title("Original Image vs. Transformed Image")
plt.show()
脚本的总运行时间:(0 分 1.657 秒)